
















This autonomous underwater vehicle (AUV) runs on solar power. The amount of power available and the weight of the power source are major factors for AUV designers and users. Click image for larger view and image credit.
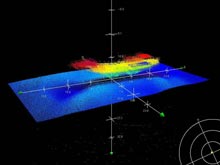
Sonar mounted on AUVs can quickly and accurately provide images of underwater objects. This sonar image of a shipwreck off Prudence Island, Rhode Island, demonstrates why marine archaeologists are interested in using AUVs for their research. Click image for larger view and image credit.

View a video animation about how the sonar mounted on AUVs can quickly and accurately provide images of underwater objects.
What Are AUVs, and Why Do We Use Them?
Denise Crimmins
Engineer and Project Manager
Naval Undersea Warfare Center - Division Newport
Justin Manley
Technology Goal Lead
NOAA Ocean Exploration and Research - Battelle
At their most fundamental level, autonomous underwater vehicles (AUVs) are simply computer-controlled systems operating undersea. They are considered autonomous because they have no physical connection to their operator, who may be on shore or aboard a ship. They are self-guiding and self-powered vehicles.
Not long ago, AUVs looked and operated like torpedoes: they were long cylinders that kept moving. As technology has improved, AUVs have become more complex, adopting a variety of new forms and functions. Now, AUVs can glide from the sea surface to ocean depths, and back. Others can stop, hover, and move like blimps or helicopters do through the air. Solar-powered AUVs can spend a portion of their time at the surface, blurring the distinction between undersea and surface vehicles.
AUVs can operate in intertidal waters (between the limits of high and low tide), and some AUVs are designed to operate up to 6,000-meter depth. The most advanced undersea system, which can reach the bottom of the ocean at 11,000 meters, is a special hybrid vehicle that includes an AUV mode. AUV systems can be small, easily portable vehicles under 100 pounds, or they can be long-endurance gliders or very large systems. The largest AUVs in service weigh thousands of pounds and require their own dedicated support vessels.
Fully autonomous operations carry power onboard. Power enables propellers or thrusters to move an AUV through the water: it's also necessary to operate sensors onboard the AUVs. In a relative sense, AUVs use more energy for their size and weight than do above-water vehicles, such as cars and airplane. (To better understand this, think about walking alongside a pool versus swimming a lap. Which requires more effort and, therefore, energy?) Most AUVs use specialized batteries, although some AUVs have used fuel cells or rechargeable solar power. Certain AUVs, such as gliders, minimize energy demands by allowing gravity and buoyancy to propel them. AUVs can run for as short as hours or as long as days or even months — depending on its power source and the task at hand — before the battery needs recharging. AUV technicians are constantly thinking about extending battery life by reducing drag or making AUVs lighter.
Early AUVs were totally reliant on their onboard software for decision making, and until recently, undersea wireless communications were effectively impossible. Once an early AUV was launched, there was no opportunity to change its programming or otherwise alter its mission. At best, operators had a tracking system so they could observe where the AUV went. If it was on course, it could be very uninteresting. If it was not on course, not knowing the reason for the error and the inability to do anything about it caused operators both excitement and anxiety.

AUVs can be extremely maneuverable, as shown in this clip of the hydrobatic unmanned underwater vehicle (UUV) in a pool test site. Think of "hydrobatics" as underwater aerobatics.

The REMUS AUV demonstrates its maneuverability in a pool test site.

The Transphibian, an AUV used by the Navy for mine identification and neutralization, is similarly nimble.
With improvements in acoustic systems, it is now possible to transmit small amounts of data between AUVs and their operators. Vehicle status, such as depth, battery level, and even some sensor data, can be sent from the AUV to the mission control computer onshore or on a boat. Low-level decisions, such as “speed up” or “turn,” are made by the computer and software on the AUV, but operators can transmit higher-level decisions, like “stop” and “come home.” Operators can also change the survey area while an AUV is submerged. Even though AUVs may receive messages from an operator, the operator is not driving. This is an important distinction from remotely operated vehicles, which an operator can control by using joystick.
Since the early 1990s, the Office of Naval Research has invested heavily in AUV technology development for military purposes, including underwater mine hunting. In the last five years, the NOAA has been considering the role of AUVs in missions that include coastal survey, fisheries research, and ocean exploration. Pilot programs have used commercially available AUVs to evaluate their ability and performance in NOAA missions. With advancements in AUV technology, some are now available commercially. As they become more sophisticated, less expensive, and able to work together as a coordinated fleet, AUV use will likely increase.
Already, AUVs are attractive options for ocean-based research. They are able to reach shallower water than boats can, and deeper water than human divers or tethered vehicles can. Once deployed and underwater, AUVs are safe from bad weather. They are also scalable, or modular, meaning that scientists can choose which sensors to attach to them, depending on their research objectives. AUVs are much less expensive than research vessels, but they can complete identical repeat surveys of an area.
Large AUVs typically carry advanced instruments for imaging what is on — and even below — the sea floor. Allowing underwater robots to sense dangerous hazards, like live underwater mines, can save lives and property. Locating hazards or shipwrecks on or below the sea floor also makes AUVs of interest to both the shipping industry and maritime archaeologists. The offshore oil industry can use the sensors to find the geological formations below the sea floor that indicate the presence of oil. Industries with underwater infrastructure, like pipes and cables, can use AUVs to identify areas that need repair.
Gliders outfitted with oceanographic sensors can measure the ocean’s conductivity, turbulence, pollutants, dissolved oxygen content, and temperature. This data can provide oceanographers with better information about ocean processes, like mixing; meteorologists with more data about weather events, like El Niño and hurricanes; managers with more information about water quality; and climate modelers with a better understanding of changes over time. Small AUVs can be equipped with unique sensors to study ocean phenomena, map coastal features (like deep-water corals), and observe marine life. Some have suggested that AUVs can even help natural resource managers monitor the activity around protected areas, like shipwrecks, or marine reserves.
Sign up for the Ocean Explorer E-mail Update List.