
































A series of six photos showing the launch of the Hugin autonomous underwater vehicle (AUV). Owned and operated by C & C Technologies, Inc., this newly developed AUV was used to complete bathymetric surveys at four sites during the Expedition to the Deep Slope 2007. Click image for larger view and image credit.
Closer and Closer to Fine
June 10, 2007
Harry Roberts
Louisiana State University
27° 38.41 N
88° 21.51 W
As Bill Shedd indicated in yesterday’s log, we recognized the need to move beyond the reconnaissance-level bathymetry provided by three-dimensional (3D) seismic data to a higher resolution image of submarine topography associated with our key sampling sites. To acquire these data, we contracted the use of an autonomous underwater vehicle (AUV) from C & C Technologies, Inc., of Lafayette, Louisiana. Their AUV, the Hugin, was the first to be used in the Gulf of Mexico. It was developed in response to needs of the oil and gas industry for pipeline surveys and sea-floor-engineering studies as exploration and production moved from the upper continental slope to the deeper parts of the northern Gulf. At water depths beyond about 1,000 meters (m), older towed vehicles became difficult to locate in the water column, and turns in a survey grid were very time-consuming because of long cable lengths. In contrast, a free-swimming vehicle like Hugin was relatively more efficient as water depths increased. In addition to high-resolution swath bathymetry, the Hugin was also designed to collect side-scan sonar data and subbottom profiles.
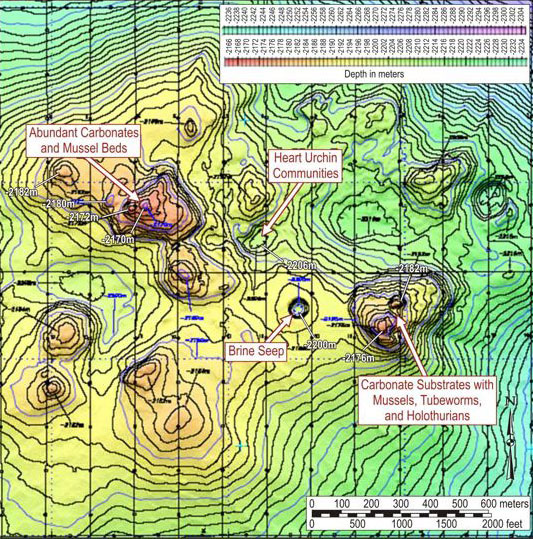
The AUV data was used to complete this high resolution bathymetric map of the Atwater Valley 340 site. Several of the habitats visited with the Alvin submersible during last summer's cruise are located on the map. We are conducting detailed sampling at many of these habitats during this 2007 cruise. Click image for larger view and image credit.
In data acquisition mode, the Hugin “flies” at a constant depth above the bottom and travels along predetermined tracks programmed into the system before leaving the support ship. Our data were acquired by a new generation of C & C Technologies AUVs, the C-Surveyor II. Based on last year’s Alvin work, researchers selected four sites located in the eastern, central, and western sectors of the northern Gulf’s deep slope were selected for detailed bathymetric surveys. These four sites were chosen from 10 sites originally determined from 3-D seismic data and verified as seeps sites by a camera survey conducted prior to the Alvin submersible dives. Each of the four AUV-surveyed sites had hydrocarbon seepage and well-developed chemosynthetic communities. We selected these sites because the AUV-resolution bathymetry would be incredibly beneficial in the development of our detailed sampling plans for the remotely operated vehicle (ROV) Jason dives on this cruise.
The high-resolution bathymetry produced by the C-Surveyor II is being used in this year’s project as an underlay map for plotting ROV Jason tracks and our sample stations. Having this high-resolution bathymetry has provided information on sea-floor configuration that has helped significantly in the planning and recording of sampling activities of all types. Within this excellent framework of AUV-derived bathymetry, the Jason is also making its own swath bathymetry maps of localized areas that have high scientific value. The Jason has a very high-resolution swath bathymetry mapping system onboard that can resolve features on the sea floor of just a few tens-of-centimeters' relief. Boulders and dense communities of tube worm bushes can be resolved with this mapping technology.
So, the scientists on this cruise have three levels of bathymetry at their disposal to support their studies: reconnaissance-level bathymetry from the 3-D seismic data, AUV bathymetry for navigating within the site and locating sample sites, and Jason ROV bathymetry for detailed spatial studies of communities and their surrounding environments.