















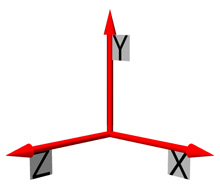
 The inertial navigation system (INS) records the movement of the autonomous underwater vehicle (AUV) in three axes: up/down, left/right, and backward/forward. This system has been used for decades on above-water vehicles, like ships, but only recently has it been miniaturized for underwater vehicles. Click image for larger view and image credit.
The inertial navigation system (INS) records the movement of the autonomous underwater vehicle (AUV) in three axes: up/down, left/right, and backward/forward. This system has been used for decades on above-water vehicles, like ships, but only recently has it been miniaturized for underwater vehicles. Click image for larger view and image credit.
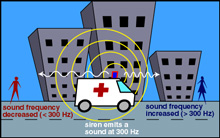
The Doppler shift is sensed as a difference in sound pitch as a vehicle emitting a sound passes the listener. The Doppler shift is about the compression or expansion of sound waves, based on the speed of the vehicle emitting the sound and the location of the listener. Image courtesy of Hong Kong University Department of Physics, www.physics.hku.hk ![]()
![]() .
.

AUV technicians watch the navigational tracks of three AUVs from an office onshore. Although technicians can update the program that determines an AUV's path to respond to a challenge, such as a current, a true autonomous vehicle is never driven by a human. Click image for larger view and image credit.
AUV Navigation
May 15, 2008
Tom Merchant
Naval Undersea Warfare Center - Division Newport
Thomas Austin
Principal Engineer
Woods Hole Oceanographic Institution
Jerome Vaganay
Navigation Engineer
Bluefin Robotics Corporation
![]() This video of the hydrobatic unmanned underwater vehicle (UUV) shows how extremely maneuverable AUVs can be.
(Quicktime, 1 Mb.)
This video of the hydrobatic unmanned underwater vehicle (UUV) shows how extremely maneuverable AUVs can be.
(Quicktime, 1 Mb.)
![]() The Transphibian AUV, used for mine identification and neutralization, is maneuverable — even with a large camera housing.
(Quicktime, 2.8 Mb.)
The Transphibian AUV, used for mine identification and neutralization, is maneuverable — even with a large camera housing.
(Quicktime, 2.8 Mb.)
Often the main purpose of an autonomous underwater vehicle (AUV) mission is to perform a large-area survey or search and to produce an accurate map of the seabed or a desired target. To achieve this goal, the AUV requires accurate self-navigation, along with speed, depth, altitude, and track-line control. The importance of accurate navigation equals the difficulty of achieving it. That's because the underwater environment is one of the most difficult places on earth to navigate accurately and reliably.
Here are four systems that assist in AUV navigation:
1. Dead reckoning
The most basic navigation system utilized in AUVs has been "dead reckoning," which refers to the combination of compass, depth sensor, and speed sensor capabilities. The compasses are digital, offering AUVs a fairly accurate heading estimation. Depth is measured with an on-board pressure sensor, and altitude is measured by acoustic echo-sounding. Speed sensors are similar to those found on boats, relying on propeller revolutions per minute (RPM) and or paddle-wheel marine speedometers. Although dead reckoning navigation is appropriate for short missions — where absolute position is not entirely necessary — it lacks the accuracy needed for many applications.
2. Long baseline navigation
Long baseline navigation systems typically include several floating buoys, with acoustic positioning sensors onboard. The acoustic positioning sensors use sound waves to allow the AUV to estimate its distance from the buoy. When a minimum of three of these buoys are used together in an area, the AUV can triangulate its position underwater. These types of systems can be very accurate; the downside is that they require the AUV operators to deploy and anchor these buoys before a mission can begin. They do not allow the AUV to operate in an environment on its own.
3. Inertial navigation system
An inertial navigation system (INS) measures the motion or acceleration of the AUV in three axes: up/down, left/right, and forward/backward. An INS provides the AUV with precise, short-term navigation, and some can even sense the rotation of the earth. Although INS has been used widely in aviation and surface ship communities for many years, the system has only recently been miniaturized for AUV use. INS on aircraft and boats relies on position inputs from global positioning system (GPS) satellites in orbit. However, just as GPS signals are lost when a car enters a tunnel, AUVs lose GPS reception as soon as their antennae submerge. Therefore, GPS is only available to help with the INS when the AUV is on the surface.
4. Doppler velocity logger
The most important system that has been developed to aid the INS is the Doppler velocity logger (DVL). The DVL is a sonar used to measure both speed and height above the bottom, and relies on the Doppler effect, the same basic principle police use to determine the speed of a car with a radar gun.
On an AUV, the DVL uses four acoustic beams to send sound pulses towards the sea floor, and listens for their echo. The DVL calculates the vehicle’s height above the bottom, based on how long it takes for the echo to return, and calculates the speed through the water based on a measurement of the Doppler frequency shift of the waves returning to the DVL.
The Doppler shift is, basically, the compression or expansion of sound waves. For instance, as an ambulance is speeding toward you with its siren on, its sound seems high in pitch. This is because the sound waves emitted by the siren are traveling at the speed of sound, plus the speed of the ambulance — an addition that ends up compressing the sound wave, making it seem higher in frequency than it really is. As the train passes, it appears to lower in frequency, as the speed of the train and the speed of sound work against each other, stretching the sound waves. The DVL senses how much the returning sound waves have stretched, and based on this calculation, determines how fast the AUV is moving.